Ford Motor Company e il Politecnico di San Pietroburgo sono giunti all’ultima fase di sperimentazione di un progetto su larga scala che studia l’applicazione, a bordo delle auto, di tecnologie di comunicazione spaziale sviluppate per il controllo a distanza di robot.
I ricercatori del dipartimento di telematica del Politecnico di San Pietroburgo hanno condotto una serie di esperimenti nello spazio sviluppando un protocollo di comunicazione multicanale sulla base del quale hanno dato il via alla ricerca portata avanti con Ford. Uno degli esperimenti prevedeva, per esempio, il controllo di un robot sulla Terra mediante input inviati tramite un joystick dagli astronauti a bordo della Stazione Spaziale Internazionale, confrontandosi con interferenze e tempi di trasmissione del segnale e simulando anche malfunzionamenti dell’infrastruttura di collegamento.
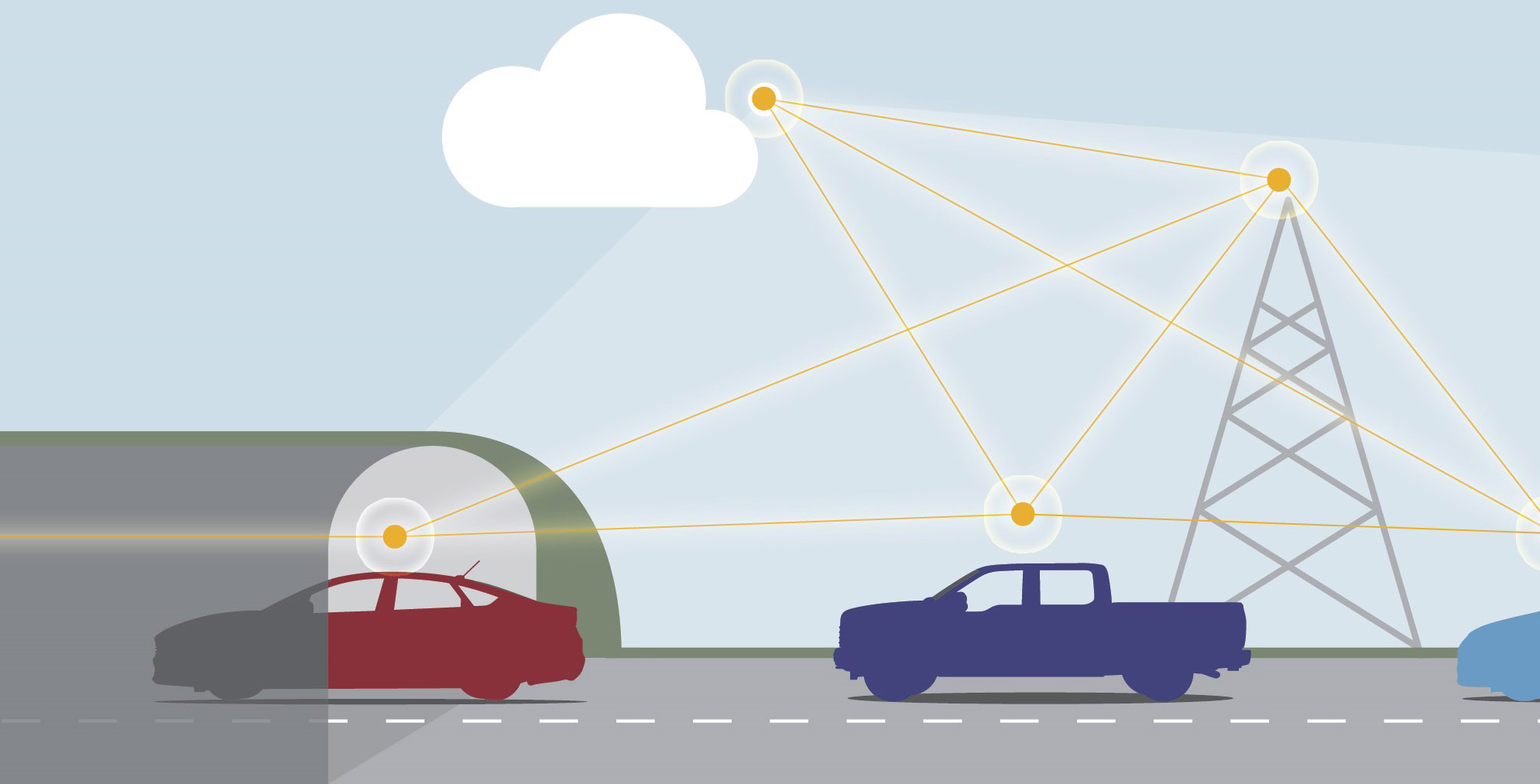
 Il progetto si basa sulla stabilizzazione dei flussi d’informazione che mettono in contatto i dispositivi con i server cloud anche nelle condizioni più difficili, per esempio nelle comunicazioni a lunga distanza e durante le congestioni di rete. In queste situazioni, la trasmissione dei dati da e verso lo spazio condivide diversi elementi con lo scenario futuro, in cui i veicoli connessi dovranno essere in grado di collegarsi tra loro e con le infrastrutture indipendentemente dalla distanza e dall’affollamento.
Il progetto si basa sulla stabilizzazione dei flussi d’informazione che mettono in contatto i dispositivi con i server cloud anche nelle condizioni più difficili, per esempio nelle comunicazioni a lunga distanza e durante le congestioni di rete. In queste situazioni, la trasmissione dei dati da e verso lo spazio condivide diversi elementi con lo scenario futuro, in cui i veicoli connessi dovranno essere in grado di collegarsi tra loro e con le infrastrutture indipendentemente dalla distanza e dall’affollamento.
Nel corso della sperimentazione, i prototipi sviluppati sono stati dotati di differenti tecnologie di rete wireless, come quella cellulare e quella Wi-Fi, e collegati tramite un software intelligente per la gestione della connettività che seleziona in tempo reale quale canale utilizzare in base alle condizioni della rete, passando fluidamente da una modalità all’altra senza perdita di informazioni.
I ricercatori hanno sviluppato, inoltre, una mappa della copertura dell’area in cui si è svolta la sperimentazione, implementando informazioni dettagliate sulla posizione, sul numero e sulla portata degli access point, nonché sulla qualità del segnale cellulare, incrociando i dati con le congestioni del traffico e simulando il carico di rete in scenari di elevato affollamento. Il team ha sviluppato modelli relativi a condizioni critiche, come gli ingressi in galleria o i trasferimenti in autostrade prive di infrastrutture di rete. In tali casi, la comunicazione auto-auto, in cui un veicolo rappresenta un nodo della rete, si è rivelata fondamentale per comunicare agli altri guidatori situazioni di emergenza come la presenza di ghiaccio sulla strada, rilevato tramite i sensori delle auto.
Il sistema intelligente di gestione della connettività può indirizzare le informazioni sia verso i veicoli in arrivo nel senso opposto di marcia che verso quelli che percorrono la strada nella direzione in cui si procede. Nel caso in cui non vi siano altri veicoli nelle vicinanze, il messaggio viene messo in coda e inviato nel cloud una volta recuperata la connettività mobile, per esempio all’uscita di una galleria, avvisando i veicoli che si avvicinano all’area della presenza di pericolo in un determinato punto. Grazie alla mappa della copertura, il sistema può calcolare in anticipo qual è il momento migliore per inviare i messaggi nel cloud in base alla posizione dell’auto.
In futuro, il volume di informazioni trasmesse da centinaia di veicoli richiederà un network efficiente e stabile. La mappa della copertura, aggiornata in tempo reale in base al traffico, sarà il database in base al quale si potrà sviluppare al meglio l’infrastruttura di supporto alla connettività delle smart city di domani. I risultati del progetto potranno essere utilizzati per lo sviluppo di nuove tecnologie per futuri veicoli connessi, per servizi come l’invio di messaggi di emergenza, di aggiornamenti sulla situazione delle strade e del traffico, o il trasferimento di aggiornamenti software.
Redazione MotoriNoLimits













{kind=link}